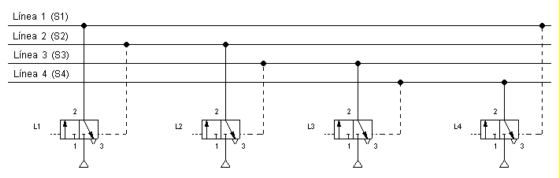
Este método presenta una mayor rapidez de mando ya que las válvulas se conectan en paralelo, alimentándose directamente de la red. Sin embargo, frente al método de cascada presenta el inconveniente que, para el mismo número de salidas, el método paso a paso necesita una válvula de memoria más, una por cada línea de salida que necesitemos. Además, no puede utilizarse cuando el número de salidas sea dos (ya que cada salida debe borrar la anterior, no podría activarse).
Para la realización del dispositivo de mando por este método, usaremos válvulas de memoria 3/2 biestables, alimentadas directamente de la red y conectadas en paralelo. Usaremos tantas como salidas deba tener el sistema (al menos 3). Todas estas válvulas estarán en posición cerrado, excepto la que da presión a la última salida, que estará en abierto, y cada válvula deberá borrar la válvula de la línea anterior
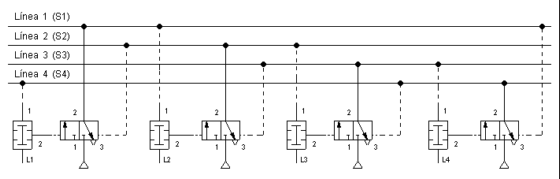
Para ganar rapidez en el mando y garantizar la seguridad, conviene que los elementos que cambian la presión del grupo, se alimenten directamente de la red y que las válvulas de control se monten en simultaneidad (usando válvulas Y) con la salida anterior, como se ve en la figura siguiente:
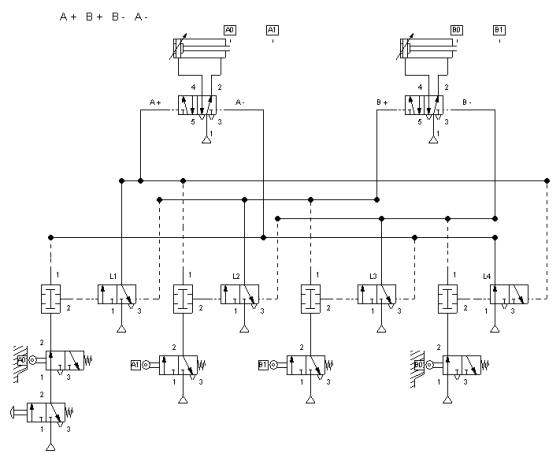
Se trata de diseñar el circuito de mando de modo que cada fase de la secuencia disponga de su propia salida. La mayor ventaja es que se puede modificar la secuencia sin tener que modificar el mando. El inconveniente es que precisaremos más válvulas de memoria, una por cada movimiento de la secuencia. Los pasos a seguir:
Secuencia: A + B + B
– A –
Tendremos tantos grupos como movimiento realiza la secuencia (4) necesitaremos por tanto cuatro válvulas de memoria en el dispositivo de mando.
A + Pulsamos
PM y el cilindro A avanza. Se desactiva A0 y se activa A1.
B + Al
activarse A1 sale el cilindro B. Se desactiva B0 y se activa B1.
B - La
activación de B1 da la orden para que B se retraiga. Se desactiva
B1 y se activará B0.
A - B0 dará
la orden para que el cilindro A se retraiga. Se desactiva A1 y se activa A0.
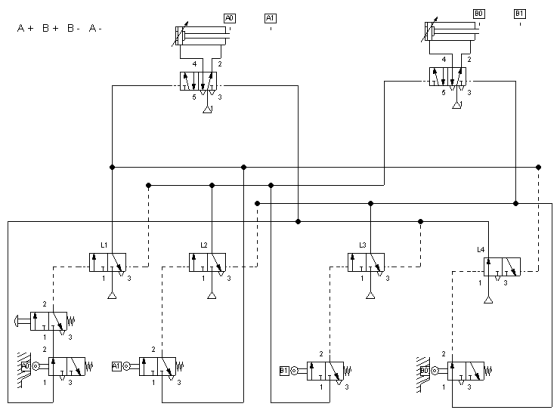
La misma secuencia utilizando válvulas de simultaneidad (Y) y tomando la alimentación de los
finales de carrera desde la red, lo que da una mayor seguridad al sistema.